















A service robot deployed in office buildings, factories, hotels, hospitals, and similar environments requires autonomous mobility and obstacle avoidance capabilities. To achieve obstacle avoidance in unknown environments, laser radar sensors are commonly employed. These sensors provide accurate environmental information, including obstacle dimensions and positions, enabling the robot to dynamically adjust its path, move safely, and accomplish tasks in real-time.
The RPLIDAR S2, developed by SLAMTEC, is a cost-effective two-dimensional laser radar product. It boasts a high-speed laser ranging sampling capability of 32,000 times per second. Utilizing non-contact energy and signal transmission technology, it overcomes the lifespan limitations of traditional laser radar, ensuring long-lasting, reliable, and stable operation.

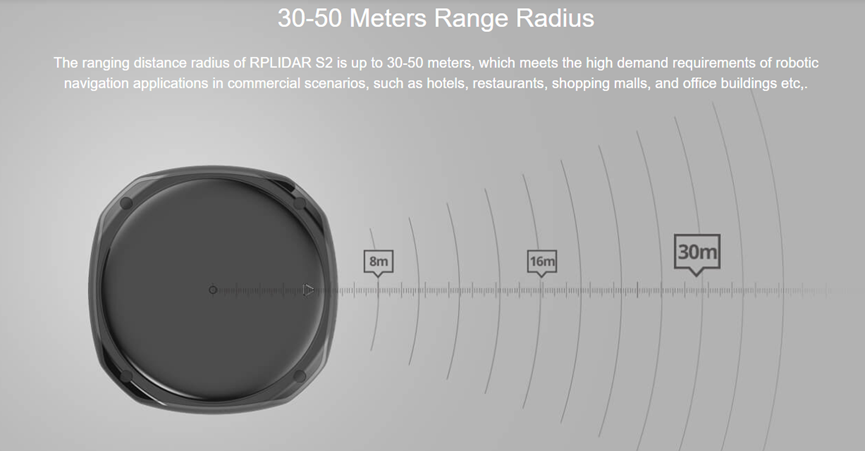
This radar is capable of conducting 360-degree omnidirectional laser ranging scans within a two-dimensional plane with a radius of 30 meters, simultaneously generating point cloud map information of the surrounding space. The point cloud map information can be applied in various fields, including map surveying, robot positioning and navigation, object/environment modeling, and other practical applications. The high-speed sampling capability of RPLIDAR S2 in laser ranging makes it well-suited for scenarios requiring precise distance information. The use of non-contact energy and signal transmission technology contributes to extending the device’s lifespan and enhancing stability during laser ranging processes. These features make RPLIDAR S2 a powerful and reliable tool, widely employed in various automation and perception applications.

With a 30-meter measurement radius
The RPLIDAR S2 demonstrates greater stability compared to other lidars when detecting long distances, transitioning between black and white objects, and encountering strong direct light. Within the 30-meter ranging radius, it delivers optimal indoor and outdoor mapping performance, expanding its applicability to a broader range of consumer and commercial scenarios.
With a sampling frequency of 32,000 times per second
The RPLIDAR S2 utilizes laser time-of-flight ranging technology coupled with SLAMTEC’s developed high-speed laser acquisition and processing mechanism. This enables it to perform ranging actions at a rate of 32,000 times per second, producing high-quality point cloud data and capturing more environmental details.
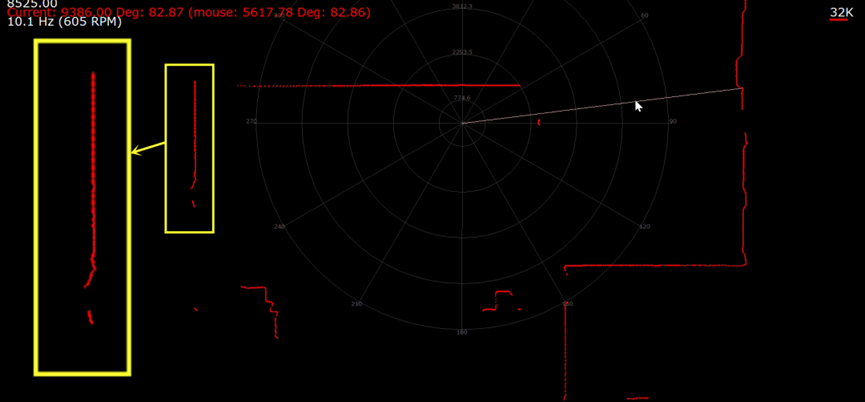
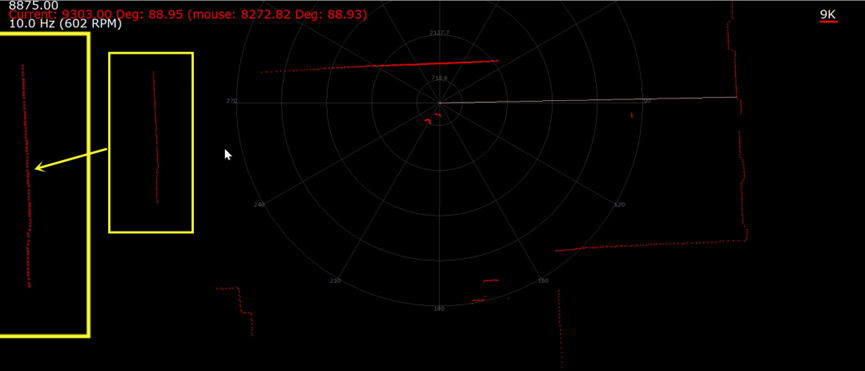
The 32k sampling frequency versus the 9.2k sampling frequency
Indoor and Outdoor Usability
The modulated laser effectively avoids interference from ambient light and sunlight during the ranging and scanning process, allowing normal operation in both indoor environments and outdoor settings without direct sunlight.

S2 operates normally under outdoor conditions with sunlight intensity of up to 80,000 lux.
In order to achieve efficient obstacle avoidance in complex environments, robots typically need to integrate multiple sensors. While laser radar provides high-precision mapping, a single sensor may be insufficient in certain situations. Supplementary sensors such as ultrasonic, infrared, cameras, etc., come into play.
These sensors work collaboratively to provide comprehensive environmental perception, enabling the robot to real-time sense and understand its surroundings. This, in turn, allows the robot to take appropriate actions to avoid collisions and navigate safely. Different applications and scenarios may require different combinations of sensors to achieve the best obstacle avoidance performance.


