















Triangulation LIDAR - Competitive Price
- RPLIDAR A2
- RPLIDAR A2





SLAMTEC
Key Features
RPLIDAR
Highlights
360° Full-scan
The RPLIDAR A2 utilizes a ranging that rotates clockwise, enabling 360° full-scan detection of the surrounding environment and producing a map of the area.

LIDAR Scanning Process
Comparison Under Different Conditions
The sample rate of LIDAR directly decides whether the robot can map quickly and accurately. RPLIDAR A2 improves the internal optical design and algorithm system to make the sample rate up to 8000 times/second.
10Hz 8000 Points
10Hz 4000 Points
10Hz 16000 Points
Up to 16m Range Radius
With algorithm optimization, RPLIDAR A2 improves the range radius to 16 meters, which will provide more data due to a larger outline map.

New Non-Contact Motor
RPLIDAR A2 uses a self-designed brushless motor to reduce mechanical friction while running as compared to the conventional belt drive mode. As a result, the RPLIDAR A2 can operate quietly without interruption.

OPTMAG Original Design
The majority of conventional non-solid LIDARs use slip rings to transmit power and data, however they only have a lifespan of a few thousand hours owing to mechanical wear. SLAMTEC has integrated the wireless power and optical communication technology to create its own OPTMAG technology, which overcome the lifespan of traditional LIDAR system. It fixes the electrical connection failure caused by the physical wearing out so as to prolong the lifespan.

Five Years Ultra-long Life
The RPLIDAR will operate for 24/7 for five years with a brushless motor and OPTMAG technology.

4cm Ultra-thin
The RPLIDAR A2 maintains its exceptional performance while cutting the thickness to only 4 cm thanks to the specially developed custom parts and the properly thought out internal mechanical system. It is ideal for all kinds of service robot.

CLASS 1 Laser Safety Standard
Using a modulated pulse type low-power infrared laser emitting light source, RPLIDAR A2 meets the Class 1 laser safety standard. The laser emits light in a very short time frame which can ensure its safety to human and pets.

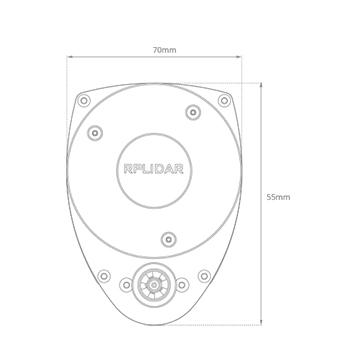
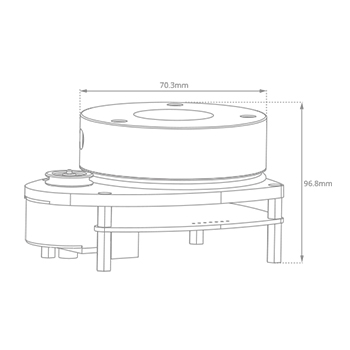
Measurement
Dimensions
| Height: 41mm | Width: 76mm | Weight: 190g |




Where to?
Applications

Robot navigation and obstacle avoidance
AGV obstacle detection and avoidance

Parking lot monitoring

Environment perception and autonomous movement of low-speed unmanned vehicles

Multi-touch and large screen interaction

UAV mapping and obstacle avoidance

ROS trolley/education trolley for mapping and obstacle avoidance
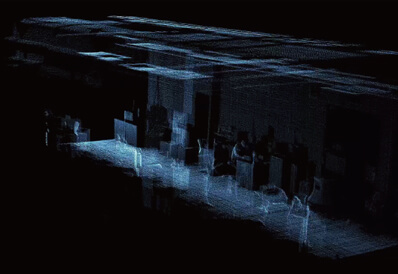
Environment scanning and 3D rebuilding
Contact Us
If you have any questions or suggestions, please leave a message, we will get in touch with you within 24 hours!