














一.RPLIDAR
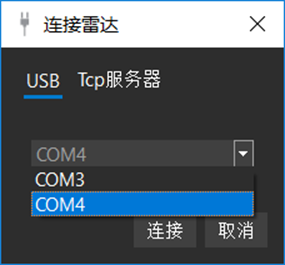
Q: Why can’t the radar connect?
A: Please check if the corresponding USB option is selected correctly. When adding a radar connection, make sure to choose the correct COM port. For example, if you’ve plugged in a radar and it has been assigned COM4, then select COM4 in the USB options, and proceed with the connection startup.
How to complete firmware upgrade for RPLIDAR?
A:https://mp.weixin.qq.com/s?__biz=MzAxNDcyMDY2OQ==&mid=2649859256&idx=1&sn=9d20
80e6a27e1542eb2393c5819087de&chksm=838a0f4ab4fd865c2892b
878a011e10763a9d8061036c6ab95092d08c6d12bb6fe231748c8dd&scene=21#wechat_redirect
Q: What should be noted during radar installation?
A: Radar Horizontal Installation Angle: 0 degrees to +2 degrees (tilted upwards).
Radar Scanning Opening Angle: It is recommended to be 270 degrees or more, ideally with openings in both the front and rear of the robot. It should be at least greater than 220 degrees.
Radar Blind Zone: 15cm. It is recommended to install the radar slightly closer to the center of the chassis structure to reduce the blind zone.
二.SLAMWARE
Q: How to set the Pose for SLAMWARE Core?
A: In the Robot page of the SLAMWARE Configuration Tool on the left side, you can configure the parameters of the SLAMWARE Core module. The Yaw angle represents the installation angle of the SLAMWARE Core module itself.
If the SLAMWARE Core module needs to be installed upside down (facing downwards), please do not select “SLAMWARE Core Head Up”. Note that the module must be placed horizontally.
Q: Does the SLAMWARE navigation solution support omni-directional wheels?
A: Yes, it does. For more details, please refer to the application manual at https://wiki.slamtec.com/display/SD/KBSW180148+Instruction+for+Integrating+SLAMWARE+Solution++in+Tri-omini-wheeled++Base
Q: What is the maximum communication delay between SLAMWARE and the chassis?
A: 1 minute.
Q: What is the resolution of the map generated by SLAMWARE?
A: 5cm.
Q: Can a USB to Ethernet converter be used to connect the SLAMWARE module and the upper computer system?
A: Yes, it can.
三.RoboStudio
Q: Why can’t RoboStudio open?
A: You need to download the latest version of RoboStudio from the official website. Older versions of RoboStudio do not support automatic updates.
Q: RoboStudio consistently fails to send activation emails after registration. What should I do?
A: Please follow these two steps:
(1) Check if you have previously registered RoboStudio but not activated it. If so, try using the “Forgot Password” feature. Activation may not be required again.
(2) If that’s not the case, download the latest version of RoboStudio from the official website (www.slamtec.com) and register for activation again.
Q: How can I obtain plugins for RoboStudio?
A: Plugins for RoboStudio require redemption codes for exchange. You can request redemption codes by sending a support email to our technical support team.
Q: Even after obtaining plugins, why don’t they appear in RoboStudio?
A: During the initial installation, ensure that your computer is connected to the internet. Failure to do so may result in plugin installation failure. Additionally, every time you acquire a new plugin, RoboStudio needs to be closed and restarted.
Q: Why can’t RoboStudio directly connect to the robot now?
A: In the latest version of RoboStudio, when connecting to the robot, you need to manually connect to the radar or robot. The robot’s IP address is uniformly set to 192.168.11.1.
四.Robot
Q: During navigation, the robot frequently changes its route even when there are no obstacles in its path. Why?
A: This could be due to false triggers from the ultrasonic sensors. It is recommended to temporarily set the number of ultrasonic sensors to zero to eliminate their interference.
Q: How does the robot determine its position? Is odometry necessary?
A: The robot primarily relies on laser radar (LiDAR) and odometry for positioning. Odometry is essential, and its resolution should be less than 1mm, with a total error of less than 5%.
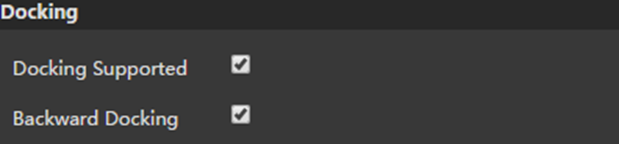
Q: Can the robot dock into the charging station in reverse?
A: Yes, it can. In the SLAMWARE chassis configuration tool, under the Docking tab, select “Backward Docking”.
Q: Since the robot chassis is not circular, how should I set the diameter of the chassis?
A: Use the center of the two wheels’ motors (or the center of the three wheels for omni-directional wheels) as the center of the circle. The furthest distance from the chassis structure that may cause interference to the radar is the radius. Multiply this radius by 2 to get the robot diameter. Draw a circle with this radius. The outermost edge of the chassis structure beyond this circle is the shortest distance to the circle and can be included in the side margin. When setting the side margin, it should be greater than or equal to this distance.
Q: Does the robot need to start up at the map’s origin point facing the same direction every time?
A: By default, the robot starts up at the origin point every time it is powered on. If you need to upload a map, ensure that the origin point of the map matches the current position of the robot.
It’s advisable to place the charging dock at this position, so the robot starts up and uploads the map from the dock each time, ensuring the alignment of the robot’s pose and the map.
If you want to use the same map but not start up at the origin point, you can save the robot’s pose when shutting down. Then, when starting up again, upload the map and simultaneously set the robot’s pose. It’s crucial for the robot’s position and orientation to correspond to the map; otherwise, navigation cannot be completed correctly.
Q: When using the moveto() function to set the robot’s movement to a target point in front, why does it not move straight even when there are no obstacles around and instead circumvents to the target point?
A: Please check the following:
(1) Are there any noise points on the saved map?
(2) Are there any false triggers from the sensors?
(3) Is the robot_size parameter set appropriately?
(4) Is the side_margin parameter set appropriately?
五.Other
Q: Is it possible to configure ultrasonic sensors as collision sensors to return data in the form of 0 and 1?
A: No, it’s not possible. If collision sensors trigger, it will cause the robot to emergency stop and reverse. Ultrasonic sensors triggering are for avoidance, behavior is different.
Q: Does the SDK have an interface for reading data from the inertial navigation module?
A: No, it does not support that.
Q: Does the SDK include an interface to automatically complete the entire area map scanning?
A: No, it does not. Users need to control the robot to complete the map scanning using tools like RoboStudio based on the actual environment. Alternatively, users can utilize existing motion interfaces in the SDK to implement custom functionalities.
If you encounter any difficulties during the product usage, please contact our technical support at support@slamtec.com.


